 И.
А. Бакланов
И.
А. БаклановАннотация. В статье приведен анализ современных технических средств управления автомобильным транспортом в системе Дорога-Автомобиль-Система управления (Глонасс, GPS). Приведены результаты анализа взаимодействия автомобиля с дорогой на сложных ее участках.
Ключевые слова: курсовая устойчивость, поворачиваемость, Глонасс\GPS, безопасность, транспортное средство.
Важной задачей обеспечения безопасности дорожного движения является обеспечение курсовой устойчивости автомобиля. Курсовая устойчивость автомобиля зависит от его загруженности и внешних факторов, таких как, например, профиль дороги, крутизна поворотов и погодные условия. Груз характеризуется следующими параметрами: Масса груза(т); Объем груза(м3); Конфигурация делимого\неделимого; Расположение груза относительно его осей.
Профиль дороги определяется основными характеристиками:
- Поперечным углом уклона α
- Продольным углом уклона (углами подъёма и спуска)β
В зависимости от этих параметров центр тяжести груженого автомобиля смещается относительно центра тяжести порожнего. При условии превышения допустимого значения смещения может происходить радиальное смещение или опрокидывание транспортного средства. В связи с этим необходимо определить величину допустимого смещения масс в зависимости от профиля дороги, а также определить критическую скорость движения транспортного средства в этих условиях.[1]
Современные автомобили для удержания устойчивого положения оснащаются системой датчиков, обеспечивающих сохранение курсовой устойчивости. Анализ технических устройств поддержания устойчивости современных транспортных средств (Volvo, MAN, Scania) показал общую для них схему датчиков, а также исполнительных органов, осуществляющих корректировку хода управления автомобиля. Датчики и исполнительные органы, связанные между собой электронным блоком управления, образуют систему обеспечения курсовой устойчивости автомобиля. (Рисунок 1)
В систему курсовой устойчивости входят следующие элементы:
- Датчики скорости на каждом колесе, позволяющие получить информацию о моменте вращения отдельного колеса
- Датчик скорости поворота автомобиля вокруг своей оси, расположенный в геометрическом центре автомобиля, позволяет получить информацию об угле отклонения от заданной траектории движения
- Датчик продольного и поперечного ускорения, также расположенный в центре автомобиля, позволяет получить информацию о скорости замедления транспортного средства в зависимости от выполняемого маневра
- Датчик угла поворота рулевого колеса (в районе рулевой рейки или непосредственно за рулевым колесом) позволяет получить информацию об угле поворота рулевого колеса
- Электронный блок управления (ЭБУ) позволяет анализировать получаемую с датчиков информацию и управлять исполнительными объектами в целях корректировки движения транспортного средства
- Исполнительные органы:
Устройство изменения положения дроссельной заслонки позволяет уменьшать скорость движения транспортного средства в зависимости от выполняемого маневра
Устройство воздействия на гидропривод (пневмопривод для грузовых транспортных средств) тормозов позволяет изменять тормозное усилие на каждом отдельном колесе в зависимости от выполняемого маневра.
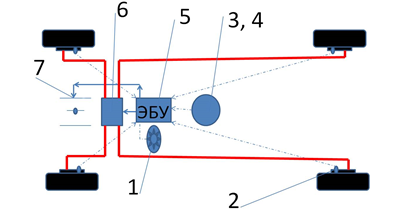
Рисунок 1 Элементы системы курсовой устойчивости:
1.Датчик угла поворота рулевого колеса; 2.Датчики скорости каждого колеса; 3.Датчик углового ускорения; 4.Датчик продольно-поперечного ускорения; 5.Электронный блок управления; 6.Устройство воздействия на тормоза; 7.Устройство воздействия на дроссельную заслонку.
Представленная схема является наиболее общей, и составляет определенную базу для получения данных о показателях курсовой устойчивости транспортного средства. Несмотря на то, что подобная схема используется для установки системы обеспечения курсовой устойчивости на большинство современных автомобилей, для ее использования в конкретных дорожных условиях и транспортных средств необходимо вносить данные о характеристиках дороги и координат центра масс груза в транспортном средстве. Внесение данных об элементах дороги требует разработки информационной базы и управление автомобилем может осуществляться на базе систем Глонасс\GPS. Это позволяет учитывать конкретные дорожные условия и «поведение» в них транспортного средства. Реализация такой схемы управления требует разработки программного обеспечения управления информационной базой обеспечения безопасности движения транспортного средства на сложных участках дороги.
В настоящее время системы Глонасс\GPS в сфере управления транспортными средствами используются лишь как средство мониторинга режима труда и отдыха водителей и определения координат расположения их автомобилей. Применение их в целях управления транспортным средством требует согласования было бы вполне разумно, так как участки дорог бывают разнообразными по профилю, следовательно, и нагрузки на автомобиль приходятся иные.[2]
Иногда несоблюдение водителями элементарных скоростных режимов в связи с незнанием участка трассы или халатностью приводит к радиальному смещению или опрокидыванию транспортного средства. Усовершенствованная система курсовой устойчивости с элементами Глонасс\GPS вмешается в процесс управления автомобилем непосредственно, либо путем некоторых рекомендаций по безопасному прохождению маршрута транспортным средством определенного типа. Подобное вмешательство позволит увеличить общий уровень безопасности всех участников движения.
На рисунке 2 приведен пример необходимой коррекции траектории движения при потере устойчивости транспортного средства на сложном участке дороги. При отсутствии датчиков коррекции курсовой устойчивости подобные отклонения от траектории движения могут возникнуть на любом типе сложного участка дороги. Предложенная схема системы обеспечения курсовой устойчивости позволяет исключить такие ситуации путем подачи сигнала об опасном участке дороги через систему Глонасс\GPS, и дать рекомендацию по максимально допустимой скорости движения транспортного средства заблаговременно.
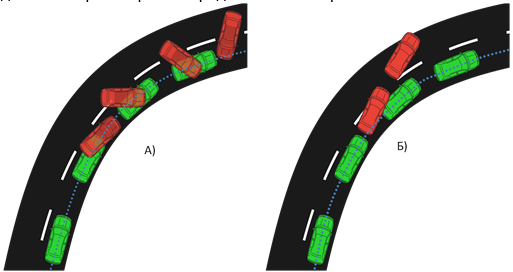
Рисунок 2 Схема отклонения транспортного средства от заданной траектории
Таким образом информация от системы датчиков совместно с информационной базой транспортного предприятия позволяет повысить курсовую устойчивость и сделать процесс управления транспортным средством безопаснее. Транспортные компании могут снизить потери за счет сокращения количества опасных маневров водителей и последующих ДТП.
Ссылки на источники
- Кожуховская Л.Я. Анализ взаимодействия автотранспортного средства с дорожным полотном на сложных участках // Л.Я. Кожуховская, И.Р Гималов Научное обозрение №4, 2015 с 104-109.
- Басков В.Н, «Прикладные задачи обеспечения качества и безопасности транспортных процессов автомобильных перевозок» / В.Н Басков, Л.Я. Кожуховская Саратов, СГТУ 2014. 134с.
