 И.
Р. Гималов
И.
Р. ГималовАннотация. Статья посвящена разработке модели управления безопасностью движения автотранспортного средства по показателям бокового зазора безопасности, радиального смещения и опрокидывания. Авторами выполнено исследование размерных и геометрических характеристик дорог, размерных и скоростных характеристик транспортных средств, исследованы условия их соответствия по размерным и скоростным характеристикам.
Ключевые слова. транспортный процесс, безопасность, структура, дорожная сеть, изменение бокового зазора, автомобиль, контроль, управление, центробежная сила.
Улучшение количественных и качественных характеристик автомобильного транспорта в России существенно влияет на безопасность
дорожного движения. Анализ причин дорожно-транспортных происшествий свидетельствует о том, что самое большие их количество происходит на сложных участках дорог с участием большегрузных автотранспортных средств. Снижение безопасности связано с превышением скорости движения, влекущее за собой радиальное смещение, занос или опрокидывание автотранспортного средства. В связи с этим авторами разработана модель[1] и программно-алгоритмическое обеспечение безопасности транспортного процесса на основе опытно-статистического метода моделирования.
В модели управления транспортным процессом по показателям безопасности важным является связь между всеми звеньями управления элементами системы ВАДС. При разработке модели безопасного движения важно получение информации об элементах системы ВАДС для принятия решения по снижению скорости движения АТС при приближении к опасному участку дороги и передачи управления процессом водителю.
Структура модели позволяет моделировать все сочетания факторов, а также определить безопасную скорость движения на конкретном сложном участке дороги, информации о координатах точки на маршруте, в которой необходимо снизить скорость, а также предоставить информацию водителю.
Принятие решения об управлении безопасностью движения осуществляется по критериям бокового зазора и курсовой устойчивости транспортного средства. Это потребовало разработки блока структурной связи блоков информации, которые представлены в виде алгоритма Рис 1. при условиях выполнения функций транспортного процесса.
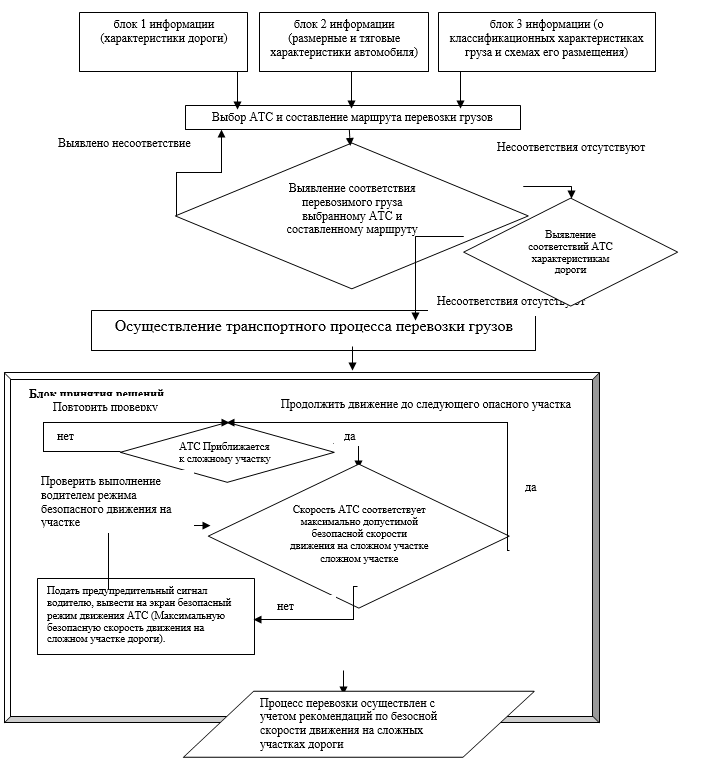
Рисунок 1 - Модель управления безопасностью транспортного процесса на сложных участках дороги.
Взаимодействие информационных блоков между собой отражает алгоритм сбора, накопления информации. Управление процессом взаимодействия представлены в виде программно-алгоритмического комплекса.
Блоки информации условно разделены на три составляющие: блок 1 информация о характеристиках дороги, блок 2 информация о размерных и тяговых характеристиках автомобиля и блок 3 информация о классификационных характеристиках груза и схемах его размещения. Разработка каждого блока потребовала анализа элементов системы ВАДС.
Блок 1 информации представляет собой детальное описание дороги по маршруту следования АТС, представлено в виде информационной таблицы, которая содержит следующие показатели: Номер элемента в плане; Угол поворота β,°; Радиус кривой R, м; Длина переходной кривой между участками lп, м; Длина прямой, а, м; Расчетная скорость Vр, км/ч; Фактическая скорость Vф, км/ч; Расстояние, проходимое ТС от момента подачи предупредительного сигнала до подъезда к опасному участку дороги, Sп, м.
Заполнение таблицы выполняется на основе информации полученной из паспорта дороги, а также информации полученной в ходе замеров с использованием приборов, таких как лазерный дальномер, электронный угломер, уровень и др.
В блок 2 накапливается информация о характеристиках АТС в виде информационной таблицы, которая содержит следующие показатели: Размерно-тяговые характеристики; Нагрузка на оси; Схемы размещения грузов; Центр тяжести.
Заполнение таблицы осуществляется на основе информации полученной из технического паспорта АТС, а также информации полученной в ходе замеров с использованием приборов.
Блок 3 информации накапливает информацию о грузе в виде информационной таблицы, которая содержит следующие показатели: Размерные характеристики; Масса груза; Тип груза; Способ погрузки.
Заполнение таблицы осуществляется на основе информации полученной в ходе замеров. Модель работы алгоритма в системе ВАДС представлена на Рис 2. результаты работы алгоритма представлены в таблице 1.

Рисунок 2- Принцип работы системы.
Таблица 1.
Расчет безопасной скорости прохождения сложного участка дороги и точки подачи предупреждающего сигнала.
|
Максимальная скорость вхождения на опасный участок |
||||||||
|
R (м) |
j |
Vз (км/ч) |
||||||
|
15 |
0,7 |
36,52 |
||||||
|
Va (км/ч) |
Vк (км/ч) |
tт (с) |
tр (с) |
tзс (с) |
tобщ (c) |
S (м) |
||
|
50 |
36,52 |
0,55 |
0,8 |
0,09 |
1,44 |
18,97 |
||
|
70 |
36,52 |
1,35 |
0,8 |
0,09 |
2,24 |
37,28 |
||
|
90 |
36,52 |
2,16 |
0,8 |
0,09 |
3,05 |
60,21 |
||
В итоге алгоритм позволяет определить безопасную скорость движения автотранспортного средства на сложных участках дороги, время до подачи и точки на карте на маршруте передачи предупредительного сигнала и точки где водитель должен выполнить рекомендации по скорости движения автомобиля.
Ссылки на источники
- Кожуховская Л.Я. Анализ взаимодействия автотранспортного средства с дорожным полотном на сложных участках // Л.Я. Кожуховская, И.Р Гималов Научное обозрение №4, 2015 с 104-109.
- Басков В.Н, «Прикладные задачи обеспечения качества и безопасности транспортных процессов автомобильных перевозок» / В.Н Басков, Л.Я. Кожуховская Саратов, СГТУ 2014. 134с.
- Кожуховская Л.Я. Современные методы контроля и управления транспортными процессами. / Л.Я. Кожуховская, И.Р. Гималов, М.С. Григорьева // Научный журнал «Научное обозрение» №1, 2014г.
