 П.
П. Гамаюнов
П.
П. ГамаюновАннотация: В результате роста энергонасыщенности, а следовательно, и скоростей движения автомобилей возникает необходимость в автоматическом управлении всеми динамическими процессами, происходящими в транспортном средстве и между его сцепными массами, которыми управляли бы плавностью хода, тягово-сцепными качествами (возможностью динамического догружения ведущих колёс тягача), курсовой и поперечной устойчивостью и управляемостью (положением центра тяжести, относительными перемещениями сцепных масс, растягивающими силами поезда, различными восстанавливающими стабильность движения моментами), процессом трогания с места, разгонными и тормозными свойствами.
Ключевые слова: факторный анализ, динамика, тягово-сцепные свойства, статическое догружение.
В качестве исходных эксплуатационных свойств на первом этапе разработки технических решений необходимо улучшение динамических и тягово-сцепных свойств транспортных средств. В качестве основного эксплуатационного свойства (базового) необходимо использовать первое, поскольку динамика транспортного средства (плавность хода, процессы трогания с места, разгонные и тормозные качества и т.д.) есть монотонная функция времени с достаточно высоким коэффициентом достоверности Кд≈0,85. Тягово-сцепные свойства (при соблюдении всех базовых статических свойств функций времени) при динамическом догружении, являются функциями ряда других переменных (состояние и свойства дорожного фона, вид конструкции догружателя, тягача и прицепа). Они выступают второстепенными свойствами, необходимыми лишь при повышенных тяговых нагрузках.
За главный критерий оптимизации динамического процесса принимаем безразмерный показатель σδRTC, называемый степенью неравномерности сопротивления передвижению транспортного средства. Он является суммарным проявлением множества возмущающих динамическую систему факторов, определяет динамику транспортного агрегата, его основные технико-экономические показатели.
При движении транспортного средства на параметр оптимизации оказывают влияние большое количество дорожно-климатических, эксплуатационных и конструкторских факторов, которые действуют извне и порождаются самой динамической системой.
Они по-разному воздействуют на критерии оптимизации, имеют разную склонность к управляемости. Все их необходимо анализировать, как-то группировать и учитывать. С этой целью нами предлагается аналитическая схема факторного анализа одноцелевого функционирования динамических систем, рис.1.
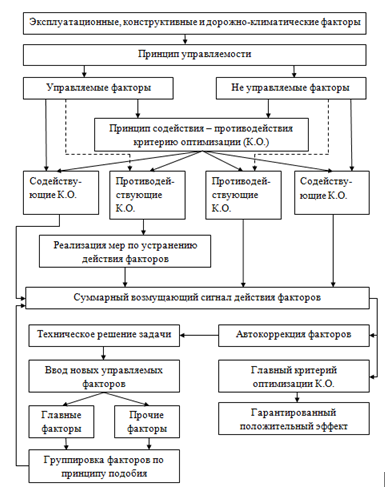
Рисунок 1 - Аналитическая схема факторного анализа одноцелевого функционирования динамических систем
На представленной схеме был проведён подробный факторный анализ, на основании которого составлялась их классификация, и каждому классу подбиралось характерное множество факторов.
Согласно разработанной схеме всё множество факторов было разделено на группы и преобразовано в минимально-возможное их количество по трём принципам: принципу управляемости; принципу содействия-противодействия условию критерия оптимизации; принципу подобия.
Это позволяет исключить из рассмотрения некоторые группы факторов (управляемые противодействующие и неуправляемые содействующие условию критерия оптимизации), воздействие отдельных из них (неуправляемых, противодействующих условию критерия оптимизации) свести к минимуму разработкой ряда технических взаимосвязанных решений, предполагающих ввод нескольких новых управляемых факторов, обеспечивающих выполнение условия критерия оптимизации в автоматическом режиме.
На основании анализа известной информации, проведённых теоретических исследований, отсеивающего эксперимента, а также требований, предъявляемых к факторам при планировании эксперимента, были выбраны следующие факторы:
Х1- величина относительных перемещений сцепных масс;
Х2- мощность упругих и демпфирующих сил, затрачиваемая на блокировку относительных перемещений сцепных масс;
Х3- момент включения в работу демпфирующих сил.
Физический смысл указанных факторов заключаются в следующем:
Фактор Х1- объединяет все колебания динамической системы и противодействует (разделяет по времени) резонансному проявлению возмущающих сил.
Фактор Х2- содержит в себе сумму блокирующих относительные перемещения сцепных масс упругих и демпфирующих сил, дифференцированных по силе и скорости протекания динамического процесса, и совершающих работу, направленную против работы возмущающих сил.
Фактор Х3- противодействует случайному процессу воздействия возмущающих сил, устанавливает оптимальный динамический режим взаимодействия сцепных масс в зависимости от скорости их относительных перемещений и величины возникающих между ними нагрузок.
На основании теоретических исследований и проведённого факторного анализа в качестве задающего сигнала для автоматического варьирования Х1, Х2, Х3 был определён входной в регулируемую динамическую систему общий сигнал суммы возмущающих факторов, совокупность взаимодействия которых выражена в виде двух обобщенных величин; усилий между сцепными массами и скоростью их относительных перемещений.
Решив задачу оптимального динамического взаимодействия сцепных масс в любых эксплуатационных условиях на втором этапе было введено в техническое решение дополнительное свойство – динамическое догружение ведущих колёс тягача (тягово-сцепные качества). Вопрос решается следующим способом.
В момент повышенных тяговых нагрузок транспортного средства, когда необходима дополнительная сила сцепления ведущих колёс тягача с почвой, т.е. дополнительная сила динамического догружения, в техническом решении должна быть заложена возможность появления этой силы при относительных перемещениях сцепных масс за счёт снижения демпфирующих сил.
Рассмотрим подробно, какими статическими и динамическими способами можно достичь этого на конкретном примере.
В классической теории улучшения тягово-сцепных свойств транспортных средств известны способы, основанные на увеличении сцепного веса Gсц до значения общей номинальной нагрузки G на колёса, росте значения коэффициента γ или использование сцепного веса тягача и прицепного состава, уменьшении коэффициента δ буксования ведущих колёс динамической системы, снижении силы сопротивления качению ψ.
Одним из наиболее перспективных направлений, нашедших большое практическое применение, является способ получения дополнительной силы догружения ведущих колёс тягача, достигаемый посредством переноса части веса прицепного состава. На основе этого способа известно множество технических решений созданных учёными и специалистами ведущих предприятий страны. Однако, известные технические решения основаны, как правило, на статическом догружении ведущих колёс тягача.
Статическое догружение безусловно воплощает в себе увеличение сцепных качеств ведущих колес тягача, однако, при движении транспортного средства по фонам с мягкой основой и бездорожью ведет к возникновению глубокой колеи, сопровождаемой резким ростом сопротивления передвижению.
Неизученным, но явным шагом вперед представляется динамическое догружение ведущих колес тягача. Оно затрагивает основы формирования динамических и тягово-сцепных качеств транспортных средств. В основе динамического догружения лежит взаимная согласованность курсовых и вертикальных относительных перемещений сцепных масс, их скоростей и ускорений, а следовательно, и рациональное распределение между ними возникающих нагрузок, кинетических и потенциальных энергий.
По принципу получения дополнительного сцепного веса можно выделить несколько способов автодинамического догружения:
- Догружение, основанное на курсовых относительных перемещениях сцепных масс;
- Догружение, основанное на вертикально-ускоренных относительных перемещениях сцепных масс;
- Догружение, основанное на центробежных (центростремительных) относительных перемещениях сцепных масс;
- Догружение, основанное на смещенных относительных перемещениях сцепных масс.
В настоящее время известны попытки автоматического изменения догрузки тягово-сцепного устройства тягача от массы прицепа на основе курсовых перемещений составных звеньев [1]. Однако, это техническое решение выполнено на недостаточном уровне и не имеет глубокой теоретической основы. Возможность получения дополнительного сцепного веса другими, более совершенными автодинамическими способами, к сожалению, в технической литературе не прослеживается. [2]
Ссылки на источники
- Оптимальное управление параметрами упруго-демпфирующего тягово-сцепного устройства / Алексеев С.А., Гамаюнов А.М. Гамаюнов П.П.,Тракторы и сельхозмашины. М., 2009 №7. – С. 30-31.
- Гапич Д.С., Стабилизация режимов нагружения колесных машино-транспортных агрегатов: автореф. Дис. …д-ра техн.наук: 0,5.20.01/ Гапич Д.С – Волгоград, 2014. - 4с
