 М.
Д. Китайгородский
М.
Д. КитайгородскийПовышение противопожарной безопасности объектов жизнедеятельности человека является важной техногенной проблемой. Пожары на предприятиях нередко сопровождаются взрывами, выбросами токсичных веществ и другими опасными для человека факторами.
Для быстрого обнаружения и ликвидации пожаров в настоящее время используются беспилотные летательные аппараты (БПЛА). Беспилотный летательный аппарат – это устройство многоразового использования, не имеющего на своем борту пилота и способное перемещаться в пространстве для выполнения задач в автономном режиме. Управление таким аппаратом может происходить с помощью дистанционных технологий, например, с помощью пульта дистанционного управления, так называемые ROV(Remotely Operated Vehicle). Управление также может осуществляться с помощью микропроцессорной системы и программы – AUV (Autonomous Unmanned Vehicle). В этом случае такой летательный аппарат можно считать роботом.
Подобного рода аппараты применяются в военных структурах с целью дистанционного ведения боя или разведки с исключением присутствия пилота, или оператора. Также БПЛА применяют не только военные структуры, но и гражданские. Подобные аппараты могут использоваться в работе служб по чрезвычайным ситуациям, полиции, предприятий сельского хозяйства, лесничества и рыболовства, компаний, занимающихся геодезией, институтов географии и геологии, компаний нефтегазового сектора, строительных предприятий, средств массовой информации и др.
Такие аппараты могут быть применены для быстрого обнаружения очагов возгорания, поиска людей, как в горящих зданиях, так и на протяженных открытых местностях. Беспилотные аппараты можно использовать и для пожаротушения [1].
Среди БПЛА особое место занимают мультикоптеры. Мультикоптер – это летательный аппарат вертикального взлёта, с 3, 4 и более несущими винтами. Подобные мультироторные системы называют в зависимости от количества несущих винтов: 3 – пентакоптер, 4 –квадрокоптер, 6 – гексакоптер, 8 – октокоптер.
Трёхроторные системы по сравнению с системами с большим количеством роторов в первую очередь отличаются способом управления, благодаря чему имеют преимущество в манёвренности, но теряют в стабильности удержании горизонта в момент разворота. Начиная с четырёхвинтовых систем и выше, отличие между ними будут только в грузоподъёмности, безопасности, и в равномерности распределения веса.
Среди летательных аппаратов вертикального взлёта, шести и более роторные системы являются более безопасными, так как в случае выхода из строя одного из роторов они способны выполнить аварийную посадку.
Летное поведение мультикоптеров похоже на поведение традиционного вертолета: мультикоптер может взлетать и садиться вертикально, зависать на одном месте и двигаться в любом направлении в любое время без предварительных разворотов. Это дает мультикоптерам, в отличие от самолетов-беспилотников, возможность маневрировать в ограниченных пространствах, таких как коридоры, офисы, площадки с технологическим оборудованием. Это также делает рассматриваемые БПЛА идеальным средством для наблюдений и инспекций внутри помещений и в окружении множества препятствий.
Устройство мультикоптера состоит из отдельных элементов: рама, движительная система, система питания, система управления.
К движительной системе относятся двигатели и пропеллеры, закреплённые на вал двигателя, либо через систему передач. Двигатели применяются преимущественно бесколлекторные, которые имеют широкий диапазон частоты вращения и высокую надежность. Пропеллеры выбираются в соответствии с мощностью и частотой вращения двигателей.
Система управления мультикоптеров, которая называется полетным контроллером, является «мозгом» летательного аппарата. К ней относятся не только элементы, обеспечивающие управление, но и устройства, отвечающие за телеметрию, и передачу данных. Обобщенной задачей полетного контроллера является несколько десятков раз в секунду выполнять цикл управления, в который входит: считывание показаний датчиков, считывание каналов управления, обработка информации и выдача управляющих сигналов моторам, чтобы выполнять команды пилота.
Обязательными датчиками, которыми снабжаются БПЛА, являются гироскоп, акселерометр, магнитометр, барометр, GPS-модуль. Данный комплекс датчиков способен описать положение и скорость передвижения мультикоптера в трёхмерном пространстве.
В качестве центрального процессора, обеспечивающего считывание данных с датчиков, расчет скоростей вращения двигателей, анализ других данных используется микроконтроллер. К функциям системы управления относятся: стабилизация аппарата в воздухе; удержание высоты и позиции; автоматический полет по заданным заранее точкам; передача на землю текущих параметров полета; обеспечение безопасности полета и др.
Существуют большое количество типов полетных контроллеров: MultiWii, ArduCopter, Rabbit, DJI Naza Lite и др. [2].
Полетный контроллер MultiWii считается одним из простых, но обладающим достаточными вычислительными возможностями не только для моделирования. Вычислительная плата реализована на микроконтроллере ATmega 2560.
Контроллер имеет современный набор датчиков, MPU6050 от InvenSense который обладает MEMS гироскопом/акселерометром на одном кристалле. Также на плате имеется 3х-осевой магнитометр и барометр с разрешением 0,01 миллибар, что соответствует погрешность измерения высоты примерно 10 см.
Основными техническими характеристиками системы являются:
- 8 выходов для двигателей;
- 8 входных каналов для стандартного приемника;
- 4 последовательных порта для отладки: Bluetooth модуль, OSD, GPS, телеметрия;
- 2 выхода для подключения серводвигателей тангажа и крена (для установки подвеса стабилизации видеокамеры);
- 1 выход серводвигателя, который можно настроить для одиночных нажатий спусковой кнопки видеокамеры;
- 6 аналоговых выходов для различных управляющих устройств;
- I2C порт для подключения дополнительных датчиков или устройств;
- две линии питания датчиков 3,3 В и 5 В;
- ATMega 2560 Микроконтроллер;
- MPU6050 3х-осевой гироскоп, 3х-осевой акселерометр;
- HMC5883L 3-осевой цифровой магнитометр;
- MS5611-01BA01 барометр;
- FT232RQ USB-UART чип и Micro USB выход.
По сравнению с другими системами автопилотирования данная плата обладает рядом преимуществ:
- имеются все необходимые датчики для устойчивого управления;
- относительно низкая цена по сравнению с другими системами автопилотирования;
- множество готовых и настроенных дополнительных интерфейсов для подключения периферийных устройств;
- доступ к коду прошивки, что позволяет перепрограммировать микроконтроллер под определенные задачи;
- удобный интерфейс для наладки и калибровки датчиков.
Для управления мультикоптером необходимы средства взаимодействия с оператором. Такие системы могут быть построены на различных платформах и иметь разный уровень сложности [3].
К относительно простым средствам управления относятся:
- Пульт управления. Оператор имеет в руках пульт со встроенным в него передатчиком работающий на FM частотах, а на мультикоптере установлен модуль со встроенным в него приёмником и дешифратором. Такая система дает полный доступ к управлению мультикоптером.
- GPS модуль. Управление при помощи GPS заключается в задании заранее заданных координатах.
- Модуль видеонаблюдения или пилотажные видеокамеры (FPV камеры). Эти камеры устанавливаются на борт мультикоптера, вертолёта или самолёта для контроля полёта пилотом. FPV камеры должны иметь определенную светосилу и тип матрицы. Камеры могут крепиться жёстко к раме, или на специальных управляемых подвесах для возможности стабилизации крена/тангажа, управления поворотом или отслеживающие положение головы пилота так называемые трекинг-камеры.
Основные элементы управления квадрокоптером показаны на рисунке 1.
Несмотря на то, что летное поведение мультикоптеров похоже на поведение традиционного вертолета, принцип управления мультикоптером кардинально отличается и заключается в изменении скорости вращения пропеллеров.
На рисунке 2 схематично показаны основные движения квадрокоптера, которые выполняются под управлением полетного контроллера.
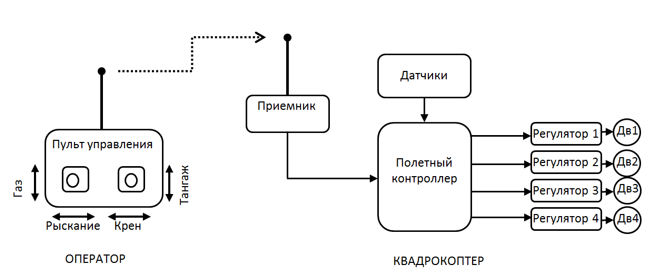
Рис. 1. Основные элементы управления квадрокоптером.
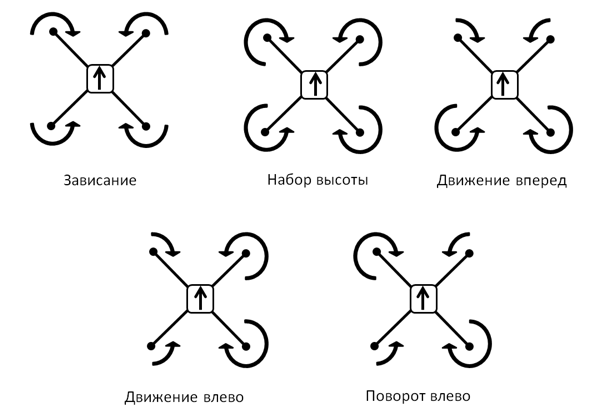
Рис. 2. Основные движения квадрокоптера
Рассматриваемые мультироторные системы используются в системах пожаробезопасности во многих странах. Беспилотные летательные аппараты решают задачи быстрого обнаружения очагов возгорания, что повышает эффективность пожаротушения. Мультикоптеры незаменимы в поиске людей в горящих и разрушающихся зданиях, что существенно снижает количество жертв в техногенных авариях.
